- See Also
-
Links
- “BetaZero: Belief-State Planning for Long-Horizon POMDPs Using Learned Approximations”, Moss et al 2023
- “Posterior Sampling for Multi-Agent Reinforcement Learning: Solving Extensive Games With Imperfect Information”, Zhou et al 2023
- “AlphaZe∗∗: AlphaZero-Like Baselines for Imperfect Information Games Are Surprisingly Strong”, Blüml et al 2023
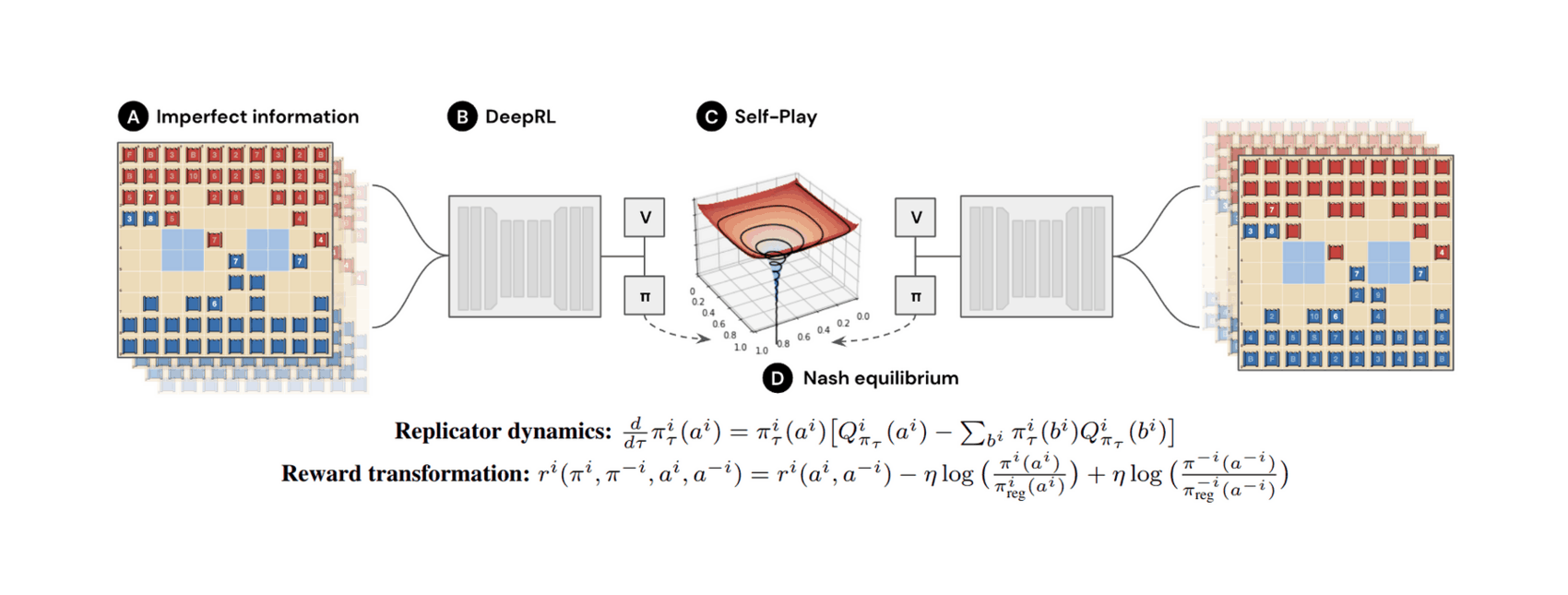
- “DeepNash: Mastering the Game of Stratego With Model-Free Multiagent Reinforcement Learning”, Perolat et al 2022
- “DouZero: Mastering DouDizhu With Self-Play Deep Reinforcement Learning”, Zha et al 2021
- “Vector Quantized Models for Planning”, Ozair et al 2021
- “Suphx: Mastering Mahjong With Deep Reinforcement Learning”, Li et al 2020
- “From Poincaré Recurrence to Convergence in Imperfect Information Games: Finding Equilibrium via Regularization”, Perolat et al 2020
- “Finding Friend and Foe in Multi-Agent Games”, Serrino et al 2019
- “Monte Carlo Neural Fictitious Self-Play: Approach to Approximate Nash Equilibrium of Imperfect-Information Games”, Zhang et al 2019
- “A Survey and Critique of Multiagent Deep Reinforcement Learning”, Hernandez-Leal et al 2018
- “Solving Imperfect-Information Games via Discounted Regret Minimization”, Brown & Sandholm 2018
- “ExIt-OOS: Towards Learning from Planning in Imperfect Information Games”, Kitchen & Benedetti 2018
- “Regret Minimization for Partially Observable Deep Reinforcement Learning”, Jin et al 2017
- “LADDER: A Human-Level Bidding Agent for Large-Scale Real-Time Online Auctions”, Wang et al 2017
- “Deep Recurrent Q-Learning for Partially Observable MDPs”, Hausknecht & Stone 2015
- “Monte-Carlo Planning in Large POMDPs”, Silver & Veness 2010
- “One Writer Enters International Competition to Play the World-Conquering Game That Redefines What It Means to Be a Geek (and a Person)”
- Wikipedia
- Miscellaneous
- Link Bibliography
See Also
Links
“BetaZero: Belief-State Planning for Long-Horizon POMDPs Using Learned Approximations”, Moss et al 2023
BetaZero: Belief-State Planning for Long-Horizon POMDPs using Learned Approximations
“Posterior Sampling for Multi-Agent Reinforcement Learning: Solving Extensive Games With Imperfect Information”, Zhou et al 2023
“AlphaZe∗∗: AlphaZero-Like Baselines for Imperfect Information Games Are Surprisingly Strong”, Blüml et al 2023
AlphaZe∗∗: AlphaZero-like baselines for imperfect information games are surprisingly strong
“DeepNash: Mastering the Game of Stratego With Model-Free Multiagent Reinforcement Learning”, Perolat et al 2022
DeepNash: Mastering the Game of Stratego with Model-Free Multiagent Reinforcement Learning
“DouZero: Mastering DouDizhu With Self-Play Deep Reinforcement Learning”, Zha et al 2021
DouZero: Mastering DouDizhu with Self-Play Deep Reinforcement Learning
“Vector Quantized Models for Planning”, Ozair et al 2021
“Suphx: Mastering Mahjong With Deep Reinforcement Learning”, Li et al 2020
“From Poincaré Recurrence to Convergence in Imperfect Information Games: Finding Equilibrium via Regularization”, Perolat et al 2020
“Finding Friend and Foe in Multi-Agent Games”, Serrino et al 2019
“Monte Carlo Neural Fictitious Self-Play: Approach to Approximate Nash Equilibrium of Imperfect-Information Games”, Zhang et al 2019
“A Survey and Critique of Multiagent Deep Reinforcement Learning”, Hernandez-Leal et al 2018
A Survey and Critique of Multiagent Deep Reinforcement Learning
“Solving Imperfect-Information Games via Discounted Regret Minimization”, Brown & Sandholm 2018
Solving Imperfect-Information Games via Discounted Regret Minimization
“ExIt-OOS: Towards Learning from Planning in Imperfect Information Games”, Kitchen & Benedetti 2018
ExIt-OOS: Towards Learning from Planning in Imperfect Information Games
“Regret Minimization for Partially Observable Deep Reinforcement Learning”, Jin et al 2017
Regret Minimization for Partially Observable Deep Reinforcement Learning
“LADDER: A Human-Level Bidding Agent for Large-Scale Real-Time Online Auctions”, Wang et al 2017
LADDER: A Human-Level Bidding Agent for Large-Scale Real-Time Online Auctions
“Deep Recurrent Q-Learning for Partially Observable MDPs”, Hausknecht & Stone 2015
“Monte-Carlo Planning in Large POMDPs”, Silver & Veness 2010
“One Writer Enters International Competition to Play the World-Conquering Game That Redefines What It Means to Be a Geek (and a Person)”
Wikipedia
Miscellaneous
{kind=link}
Link Bibliography
-
https://arxiv.org/abs/2206.15378#deepmind: “DeepNash: Mastering the Game of Stratego With Model-Free Multiagent Reinforcement Learning”, -
https://arxiv.org/abs/2106.04615#deepmind: “Vector Quantized Models for Planning”, Sherjil Ozair, Yazhe Li, Ali Razavi, Ioannis Antonoglou, Aäron van den Oord, Oriol Vinyals -
2010-silver.pdf: “Monte-Carlo Planning in Large POMDPs”, David Silver, Joel Veness